






DJI ha rediseñado su Phantom 4 con las exigencias del mercado de topográfico con un dron que equipa una cámara de alta resolución y la capacidad de capturar datos RTK con precisión de centímetros

| Dron DJI Phantom 4 RTK | |||
|---|---|---|---|
| 1 Dron RTK | -- | ||
| Pack DJI Phantom 4 RTK + D-RTK 2 | |||
| 1 Dron + antena de referencia | -- | ||
| Pack DJI Phantom 4 RTK & Pix4D Mapper | |||
| 1 Dron + Software de procesamiento nubes en 3D | -- | ||
Packs Phantom 4 RTK |
Incluye |
Descripción |
|
Phantom 4 RTK |
Dron DJI Phantom 4 RTK | Solución estándar, diseñada para topografía con la capacidad de capturar datos RTK |
|
Phantom 4 RTK + D-RTK2 |
Dron DJI Phantom 4 RTK y Antena de referencia D-RTK 2 | Solución que le confiere más precisión tomando datos de referencia de la antena D-RTK2 de DJI |
|
Phantom 4 RTK + Pix4D Mapper |
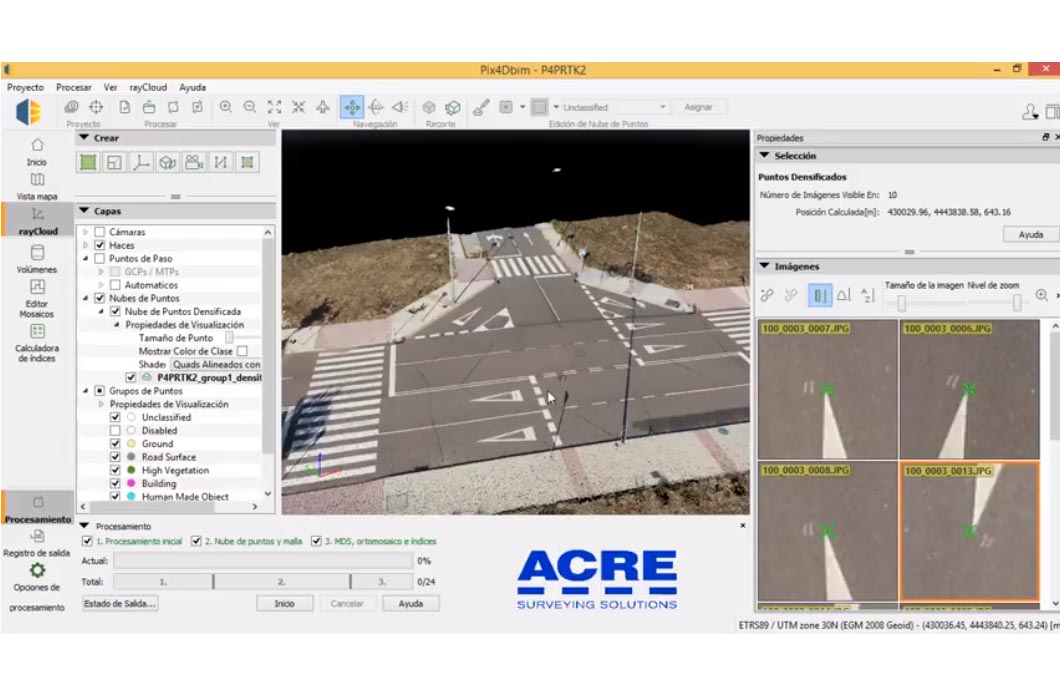
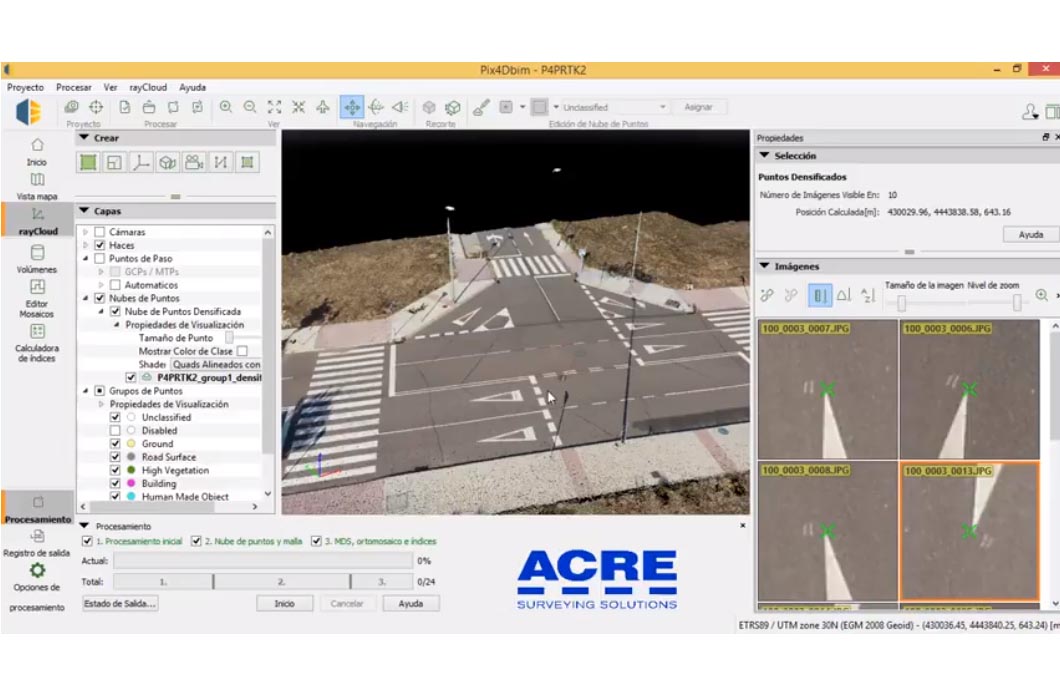
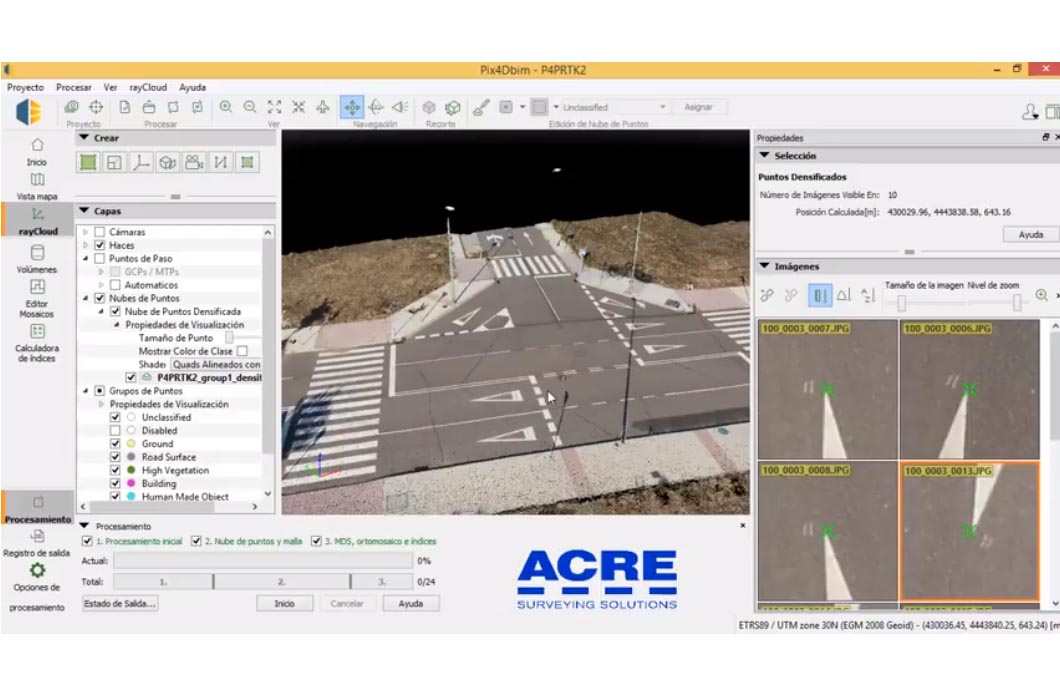
Dron DJI Phantom 4 y Software procesamiento de nubes Pix4D Mapper (Licencia anual) | Solución integral que incluye, además de lo anterior, el software de procesamiento para realizar levantamientos y nubes de puntos georreferenciados y altamente precisos. |
DJI ha replanteado su tecnología de drones desde el principio, revolucionando sus sistemas para lograr un nuevo estándar para la precisión de los drones: el resultado de la creación del Phantom 4 RTK.
El Phantom 4 RTK ha sido diseñado teniendo en cuenta los requisitos del mercado de topografía y mapeo desde sistemas aéreos no tripulados brindando una solución de avión no tripulado compacta con una cámara de alta resolución y la capacidad de capturar datos RTK con precisión de centímetros.


El nuevo módulo RTK está integrado directamente en el Phantom 4 RTK, proporcionando datos de posicionamiento en tiempo real para mejorar la precisión absoluta en los metadatos de la imagen.Justo debajo del receptor RTK se encuentra un módulo GNSS redundante, instalado para mantener la estabilidad del vuelo en regiones con poca señal, como las ciudades densas.
Combinando los módulos GNSS y RTK, el Phantom 4 RTK puede optimizar la seguridad de vuelo al tiempo que garantiza la captura de los datos más precisos para los complejos flujos de trabajo de levantamiento, cartografía e inspección.
Real-Time Kinematic o RTK es un sistema avanzado de posicionamiento satelital que utiliza una estación terrestre como referencia de posición secundaria para proporcionar datos de un centímetro de precisión.
Combine y contraste los datos de posición capturados de la estación base virtual y física, la cámara Phantom 4 RTK georreferencia los datos de precisión a nivel de centímetro en la imagen.
Las distorsiones de lentes radiales y tangenciales se cuantificaron para que cada cámara del Phantom 4 RTK tenga unos parámetros de distorsión únicos y recopile estos parámetros de distorsión en la imagen para la calibración posterior al proceso.
Disfrute de una transmisión de vídeo en vivo HD estable y confiable a distancias de hasta 4.3 millas, ideal para mapear sitios a gran escala
Para aprovechar al máximo los módulos de posicionamiento Phantom 4 RTK, el nuevo sistema TimeSync se creó para alinear continuamente el controlador de vuelo, la cámara y el módulo RTK. Además, TimeSync garantiza que cada foto use los metadatos más precisos y corrige los datos de posicionamiento en el centro del CMOS, optimizando los resultados de los métodos fotogramétricos y permitiendo que la imagen alcance los datos de posicionamiento a nivel de centímetro.
Habilitar la corrección de la distorsión calibraría la distorsión óptica causada por la lente de la cámara, las imágenes calibradas en tiempo real se capturan y almacenan en la tarjeta Micro-SD.
Si se desactiva la corrección de distorsión, la cámara Phantom 4 RTK capturará la imagen sin editar con el efecto de ojo de pez. Los parámetros de distorsión de la lente fueron pre-medidos. Todos estos parámetros se guardarán en “DewarpData” en el campo XMP para cada imagen tomada.También puede ingresar estos parámetros manualmente para calibrar la distorsión de la imagen con software de terceros.
 Antena de referencia D-RTK 2
Antena de referencia D-RTK 2Admite cuatro sistemas de navegación por satélite: GPS, GLONASS, BeiDou y Galileo
• Soporta conectividad OcuSync y 4G
• La función de detección estática mejora la fiabilidad general del sistema de posicionamiento
• Compatible con múltiples modelos de drones DJI
Actualmente, los datos de posición se escriben en los campos XMP y Exif. Necesitará utilizar software de terceros para extraer los datos de la posición.
El Phantom 4 RTK proporciona el mismo sistema de coordenadas que el dato CORS, también se requiere el sistema de coordenadas geodésicas WGS 86. La información pos sería necesaria para marcar el mapa en diferentes marcos de coordenadas. Convierta los parámetros medidos con el método de transformación de Helmert y luego convierta las coordenadas originales del Phantom 4 RTK para el marco de coordenadas deseado. (DJI no proporciona la herramienta de conversión de parámetros o conversión de coordenadas. Tenga en cuenta que la transformación de coordenadas es un proceso complejo y propenso a los errores, así que por favor verifique todos los parámetros y configuraciones antes del proceso de conversión) Importe todas las coordenadas convertidas como el datum de pos, comience El proceso de mapeo.


Una nueva aplicación GS RTK otorga a los usuarios más posibilidades para controlar su Phantom 4 RTK, con dos modos de planificación (fotogramétrico y trayectoria) que se unen al modo de vuelo tradicional. Los modos de planificación permiten al piloto establecer la trayectoria de vuelo del dron y establecer parámetros como el ratio de superposición, la altitud, la velocidad y la configuración de la cámara, entre otros. Esto permite automatizar los flujos de trabajo de cartografía o inspección.
La aplicación GS RTK ha sido creada pensando en sus usuario, y tiene numerosas funciones diseñadas para flujos de trabajo específicos de cartografía o inspección. La aplicación permite cargar directamente archivos de área KML para planificar los vuelos en la oficina, tiene un modo de prioridad del obturador con el que la exposición se mantiene constante en todas las fotos, y una alarma por fuertes vientos previene a los pilotos de condiciones climáticas adversas.


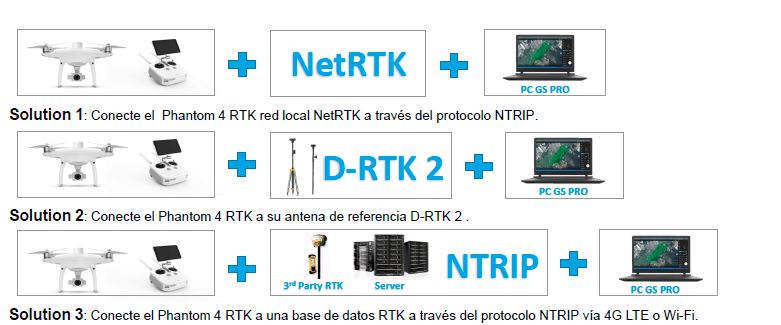
Con un nuevo sistema RTK, replanteamiento interno que resultó en TimeSync y una aplicación de vuelo llave en mano, el Phantom 4 RTK se convierte en el principal valedor de la comunidad topográfica. Con la capacidad de conectar el sistema de posicionamiento a la estación móvil D-RTK 2, NTRIP (transporte de red de RTCM a través del protocolo de Internet) usando un punto de acceso móvil, o almacenar los datos de observación satelital para PPK, el Phantom 4 RTK se adapta a varios Flujos de trabajo para soluciones profesionales.
El nuevo módulo RTK está integrado directamente en el Phantom 4 RTK, proporcionando datos de posicionamiento en tiempo real para mejorar la precisión absoluta en los metadatos de la imagen.
El Phantom 4 RTK corrige la distorsión ocasionada por la cámara, el efecto "ojo de pez" proporcionado una imagen ajustada a la realidad
Disfrute de una transmisión de vídeo en vivo HD estable a distancias de hasta 4.3 millas, ideal para mapear sitios a gran escala

Mientras que los modelos previos de la serie Phantom 4 estaban dirigidos a fotógrafos profesionales y aficionados, el Phantom 4 RTK está dirigido a usuarios de empresa que realicen tareas de cartografía de alta precisión y de recogida de datos similares. El Phantom 4 RTK tiene una forma y un tamaño similares. A ellos añade u un módulo de posicionamiento RTK, el nuevo sistema TimeSync y una aplicación de cartografiado, entre otras cosas.
El Phantom 4 RTK utiliza las mismas hélices de liberación rápida 9450s que el Phantom 4 Pro.
No, el Phantom 4 RTK tiene versiones específicas para cada país y/o región. Los usuarios pueden consultar el código de su versión en el embalaje del producto o en la aplicación GS RTK (ve a Aircraft Information – Firmware).
Mientras que el Phantom 4 RTK y el Phantom 4 Pro/Advanced comparten el mismo sensor CMOS de una pulgada y 20 megapíxeles, la cámara del Phantom 4 RTK ha pasado por un proceso de medición y grabación de la distorsión del objetivo para poder ser utilizada en labores cartográficas. Todas las cámaras del Phantom 4 RTK pasan por un proceso de calibración en el que se mide la distorsión del objetivo y se graba en parámetros OPEN-CV. La cámara permite a los usuarios realizar imágenes sin corrección de la distorsión, junto con los parámetros de distorsión en OPEN-CV en un archivo XMP para su posprocesado.
Sí, los filtros ND del Phantom 4 Pro se pueden utilizar para el Phantom 4 RTK.
Sí, puedes activar la corrección de distorsión en la cámara, pero las imágenes serán menos precisas que las que se pueden obtener eliminando la distorsión en posprocesado.
El control remoto del Phantom 4 RTK ha recibido varias modificaciones para aumentar su versatilidad y utilidad para usuarios de empresa. Estas incluyen una ranura para tarjetas microSD, un altavoz integrado y baterías de cambio en caliente. Además, los usuarios pueden utilizar sus controles remotos para conectarse por Internet a una red RTK con un accesorio 4G. Por último, la nueva aplicación GS RTK está preinstalada en todos los controles remotos, permitiendo a los pilotos comenzar a recoger datos nada más sacar el dron del embalaje.
No, tampoco puedes controlar el Phantom 4 RTK con un control remoto del Phantom 4 Advanced o Pro.
No se puede cambiar entre modos FCC y CE.
Puedes completar la vinculación con la aplicación GS RTK. Consulta el Manual de Usuario para más detalles.
El alcance efectivo de transmisión de vídeo depende de tu configuración de trabajo (por ejemplo, de la posición de la antena) y del entorno de vuelo. En una zona abierta y sin obstáculos, el alcance máximo es de 7 km siguiendo las normas de la FCC y de 5 km siguiendo las normas de la CE. (2.4 GHz)
Esto quiere decir que una incorrecta colocación de la antena afectará a la transmisión de vídeo y a la calidad de la vista en tiempo real. Puedes ajustar las antenas para que el lado plano de la antena mire hacia el Phantom 4 RTK.
Sí, si se pierde la señal de vídeo puedes volver a conectarte y reanudar la tarea.
Sí, el Phantom 4 RTK y el Phantom 4 Pro tienen baterías compatibles, con la misma capacidad. Esto quiere decir que el tiempo de vuelo no se verá afectado.
Hacen falta unos 60 minutos para cargar por completo la batería del Phantom 4 RTK.
Mantén las baterías del Phantom 4 RTK en un lugar seco y lejos del agua. Para almacenarlo a largo plazo, asegúrate de que las baterías estén cargadas a más 50% y descárgalas cada tres meses para mantenerlas activas.
Quiere decir que la batería está a menos de 3.62 V y tiene que cargarse pronto.
La capacidad de la batería y, por tanto, su tiempo de vuelo descenderán dramáticamente a bajas temperaturas (< -10ºC). Se recomienda que calientes las baterías hasta los 20 ºC antes de volar para aminorar este efecto.
Ese fenómeno es normal. Cuando las baterías se almacenan durante mucho tiempo con más del 65% de carga restante, se iniciará un proceso de descarga automática para reducir la batería al 65%. Esto hará que la batería se caliente.
El Phantom 4 RTK puede capturar datos con una precisión de 1 cm + 1 ppm (horizontal) y 1.5 cm + 1 ppm (vertical).
TimeSync sincroniza continuamente al controlador de vuelo, la cámara y el módulo RTK, y ajusta los datos de posicionamiento al centro del CMOS, guardando los datos en formato EXIF y XMP.
RTK y PPK son dos tecnologías cinemáticas diferentes y referencian los datos de formas diferentes. Aunque PPK tiene por norma general una precisión ligeramente superior a RTK, ambos llegan a un nivel de precisión centimétrico. Se recomienda utilizar RTK a usuarios que vayan a volar en entornos con conexión en tiempo real a través de OcuSync o 4G y que prefieran la practicidad y eficiencia. Para usuarios que dispongan de suficiente tiempo y a los que nos les importe operar sin conexión, PPK es una mejor opción.
Abre la foto en formato de texto y busca “XMP” para encontrar esta información en cada foto.
Gracias al nuevo sistema TimeSync, cada foto almacena la posición del centro del CMOS en los metadatos.
Para cada foto el nivel de compensación entre el centro de fase de la antena del módulo RTK y el sensor CMOS se guarda en la marca temporal en el sistema de coordenadas NED en un fichero .MRK en una carpeta llamada “survey”.
Actualizar el firmware del Phantom 4 RTK es similar a la actualización del firmware del Phantom 4 Pro. Puedes actualizar el firmware del control remoto y de la aeronave por separado utilizando el DJI Assistant 2.
También puedes actualizar ambos firmwares al mismo tiempo utilizando la aplicación GS RTK. Primero tienes que conectar el control remoto a la aeronave con cables OTG y USB. Luego sigue las instrucciones de la aplicación GS RTK del control remoto.
En estos momentos los sensores infrarrojos no están activas, vuela con precaución.
Los usuarios pueden utilizar la aplicación preinstalada GS RTK para cartografía e inspección. Además, los usuarios pueden instalar aplicaciones hechas con el SDK Móvil de DJI.
No. La lógica del regreso al punto de origen es prácticamente la misma en ambas aeronaves.
Sí, la distancia entre cualquier par de puntos de referencia no puede exceder los 2 km, no puede haber más de 99 puntos de referencia y la longitud total de la trayectoria no puede superar los 15 km.
No.
En estos momentos GS RTK permite fijar hasta 99 puntos de perímetro con ficheros KML.
En estos momentos el Phantom 4 RTK es compatible con datos RTCM 3.0, RTCM 3.1, MSM4 y MSM5 bajo RTCM3.2.
Las coordenadas medidas por el Phantom 4 RTK son coordenadas absolutas en el sistema de coordenadas elegido por el usuario.
Puedes utilizar la ecuación H = 39 × GSD para estimar la altitud de vuelo apropiada. Por favor ten en cuanta que el tamaño del pixel del suelo (GSD, por sus siglas en inglés) en esta ecuación está medido en centímetros, mientras que la altiud de vuel (H en la ecuación) está medida en metros.
El Phantom 4 RTK recoge la altitud respecto al nivel del mar y la altitud relativa a tu punto de despegue. La altitud respecto al nivel del mar se puede usar para la cartografía, mientras que la altitud relativa puede encontrarse en el archivo XMP.
Las imágenes oblícuas pueden capturarse volando en modo fotogramétrico en la aplicación GS RTK. En modo fotogramétrico, puedes ajustar el ángulo del estabilizador de -90º a -45º bajo Camera Settings según tu plan de vuelo. Solo puedes establecer un ángulo de estabilizador al mismo tiempo, así que si deseas capturar el mismo lugar desde varios ángulos tendrás que planificar la misma misión con diferentes ángulos de cámera.
Sí, puedes utilizar software de terceros para procesar los datos de imagen del Phantom 4 RTK y crear modelos. Sin embargo, la precisión variará en función del algoritmo fotogramétrico utilizado. Por favor, consulta al proveedor de software para más información respecto a la precisión a esperar.
Al recoger datos de infraestructuras o de corredores estrechos, sugerimos establecer un ratio de solapamiento elevado, volar la aeronave a mayor altitud de lo habitual y planificar al menos dos rutas de vuelo para el corredor.
No, no puedes conectar estaciones base de terceros al Phantom 4 RTK o al control remoto a través de una estación de radio. Sin embargo, puedes obtener los datos de un servidor RTK en una red Wi-Fi o 4G con el protocolo NTRIP. Los usuarios pueden almacenar en la aeronave datos de satélite para realizar posprocesado cinemático (PPK) para completar sus tareas.
| Tiempo de vuelo máximo | Approx. 30 minutos |
| Peso total (con hélices y baterías) | 3 lbs (1.39 kg) |
| Sistema de transmisión de vídeo | OcuSync |
| Rango máximo de transmisión | 4.3 miles (7 km) |
| Horizontal Precisión horizontal RTK | 1 cm + 1 ppm |
| Vertical Precisión Vertical RTK | 1.5 cm + 1 ppm |
| Precisión horizontal absoluta en modo fotogramétrico | 5 cm* |
|
Control remoto con pantalla y compatibilidad 4G
|
Incluido |
| Módulo RTK con precisión centrimétrica | Incluido |